|
Email / Google Scholar / Github / CV |
 |
|
✉️ I'm expected to graduate in 2025 and am open to both academia and industry positions. If you're interested, please feel free to contact me. 📌 I'm also seeking self-motivated undergraduate and graduate students for academic collaboration. |
|
|
|
|
 |
Ph.D. Candidate | Electronic and Computer Engineering (ECE), HKUST |
 |
B.Eng | Mechatronics Engineering (ME), HIT |
|
My research focuses on robotics and deep learning, including perception, prediction, and planning. Before HKUST, my research worked on perception and trajectory prediction in autonomous driving. In the present stage, I focus on autonomous and intelligent perception-centric flight including aerial inspection/reconstruction/exploration/coverage, and 3D scene understanding. |
 |
We propose AD-Planner, a systematic solution for reliable and efficient delivery using a quadrotor with a suspended payload. Our approach integrates several key components to tackle the major challenges of accuracy, safety, feasibility, flexibility, and efficiency. |
 |
We introduce FALCON, a novel Fast Autonomous expLoration framework using COverage path guidaNce, which aims at setting a new performance benchmark in the field of autonomous aerial exploration. FALCON effectively harnesses the full potential of online generated coverage paths in enhancing exploration efficiency. |
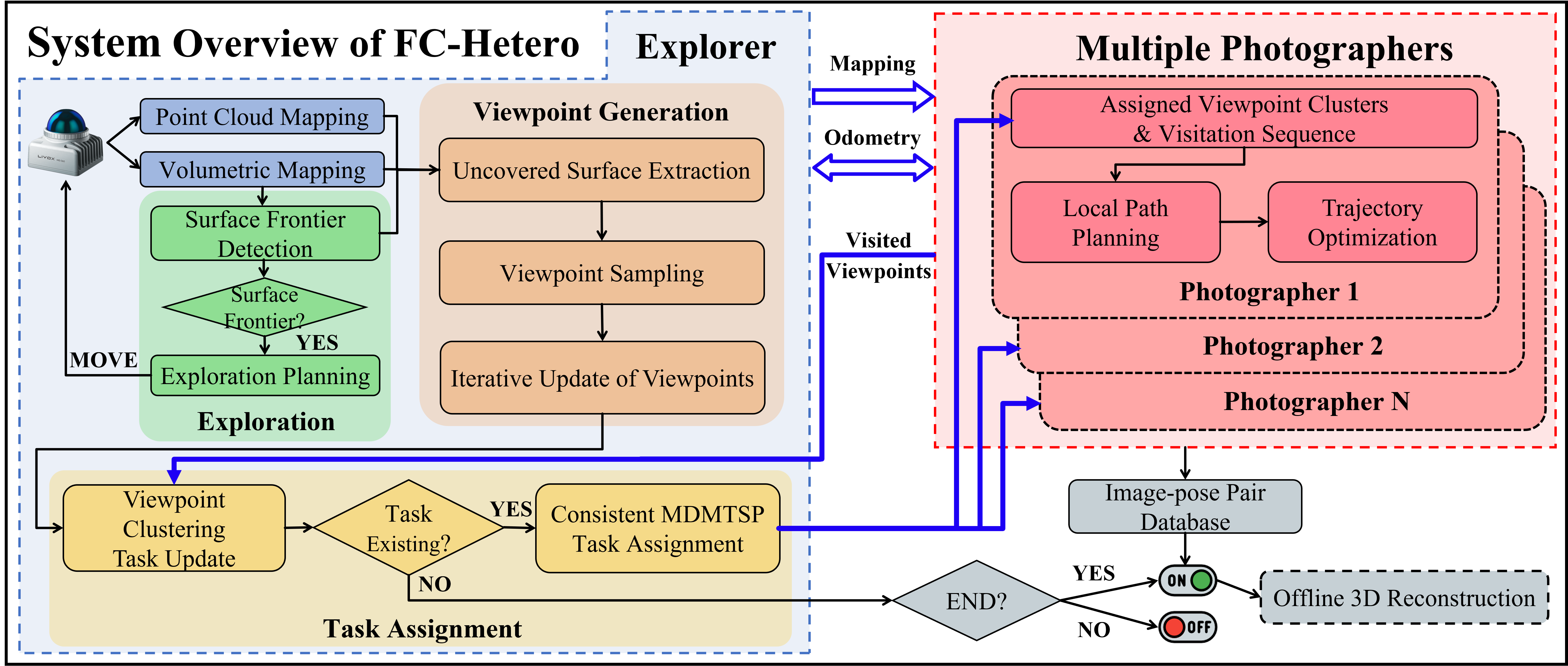 |
We introduce SOAR, a LiDAR-Visual heterogeneous multi-UAV planner that enables simultaneous exploration and photographing for fast autonomous reconstruction of complex scenes. |
 |
We introduce OmniNxt, the first fully open-source aerial robotics platform with omnidirectional visual perception. OmniNxt boasts a compact size with exceptional computational resources. Thanks to our meticulous development, we endow OmniNxt with an expansive perception range and efficient resource consumption. |
 |
We propose MASSTAR, a Multi-modal lArge-scale Scene dataset with a verSatile Toolchain for surfAce pRediction and completion. We develop a versatile and efficient toolchain for processing the raw 3D data from the environments. |
 |
We propose Star-Searcher, a complete and efficient aerial system for autonomous target search in complex unknown environments. Our aerial system incorporates specialized sensor suites, mapping, and planning modules, all geared towards improving task efficiency and completeness. |
 |
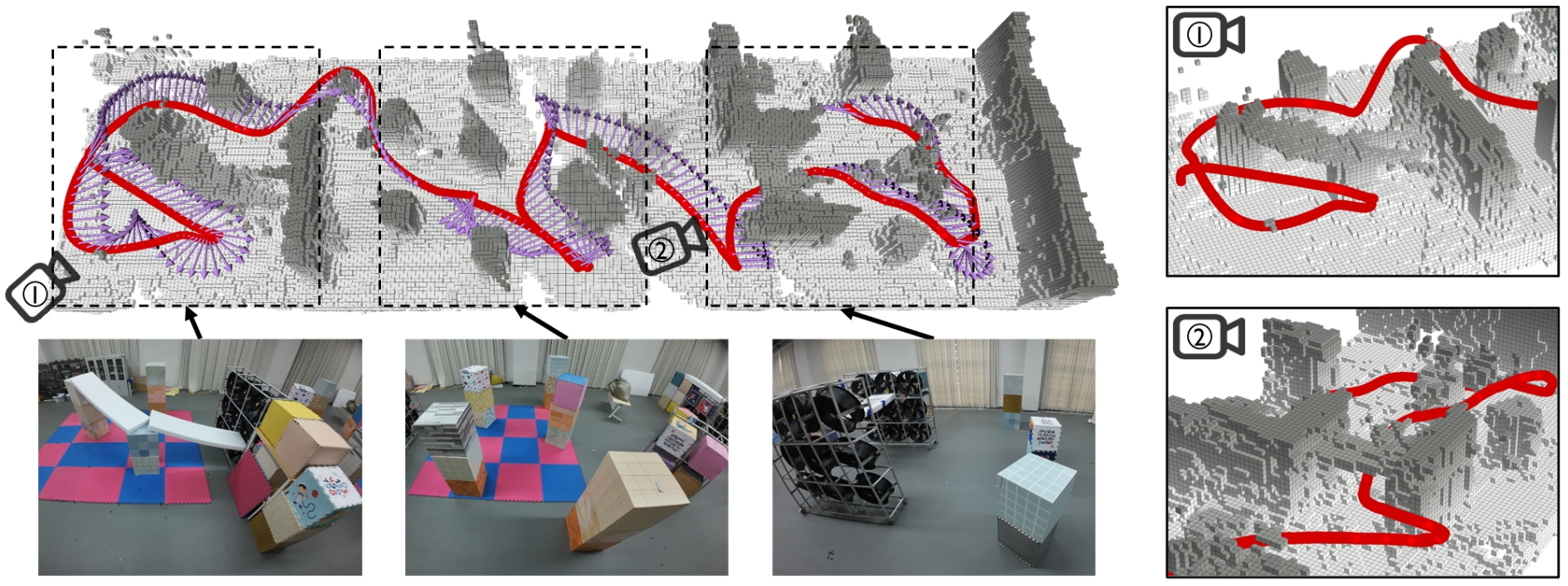
We propose FC-Planner, a skeleton-guided planning framework tailored for fast coverage of large and complex 3D scenes, which results in the generation of high-quality coverage paths and high computational efficiency. |
 |
We propose MacFormer, an one-stage Map-Agent Coupled Transformer for real-time and robust trajectory prediction that explicitly incorporates map constraints into the network achieving state-of-the-art performance with significantly lower inference latency and fewer parameters. |
 |
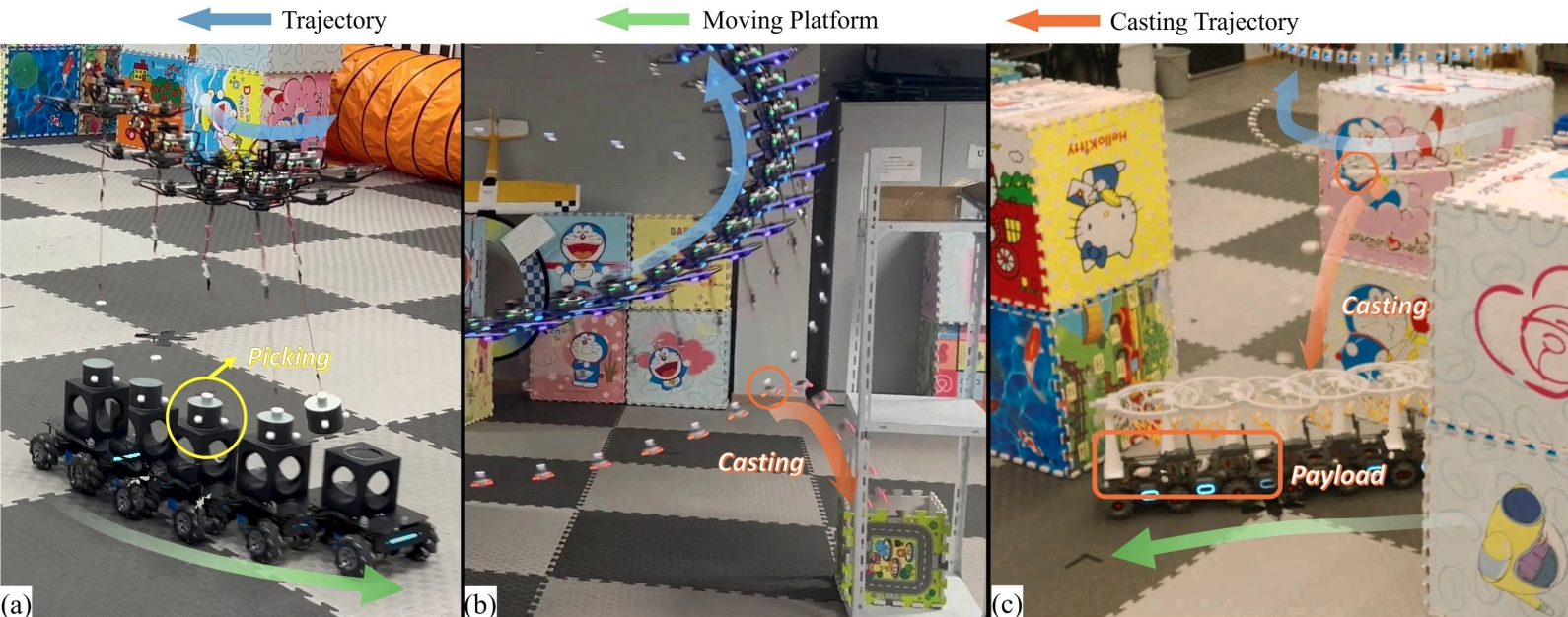
We propose AutoTrans, a systematic solution for fully autonomous aerial payload transportation that includes a real-time planning solution to generate smooth trajectories and an adaptive NMPC with a hierarchical disturbance compensation strategy to overcome unknown external perturbations as well as inaccurate model parameters. |
 |
We propose PredRecon, a prediction-boosted planning framework that can efficiently reconstruct high-quality 3D models for the target areas in unknown environments with a single flight. |
 |
We propose TENET to enhance the trajectory temporal encoding via Temporal Flow Header. Besides, an efficient K-means ensemble method is used. Using our Transformer network and ensemble method, we win the first place of Argoverse 2 Motion Forecasting Challenge with the state-of-the-art brier-minFDE score of 1.90. |
|
2024.05, ICRA 2024 Best UAV Paper Award Finalist - IEEE. 2021.09, Postgraduate Studentship - HKUST. 2021.06, Outstanding Graduate - HIT. 2020.08, ABU ROBOCON Robotics Competition First Prize - ABU. 2019.08, National University Students Robotics Competition, RoboMaster First Prize - DJI. 2018.12, Outstanding Student - HIT. 2018.12, National Scholarship - Ministry of Education, PRC. |
|
2024.06, Fast and Autonomous Aerial Coverage and Reconstruction of Large-scale Scenes - TechBeat. |
|
Reviewer: T-ITS, RA-L, ICRA, IROS, CVPR Teaching Assistant: |
|
Skills: Python / C++ / Matlab, PyTorch / MegEngine, Linux, ROS, OpenCV, SolidWorks, Adams, ANSYS, Mechanical design |
|
|
Last update: 2025.03.20. Thanks. |